
南極に広がる氷の下はどのような世界が広がっているのでしょうか。人が潜ることのできない氷の下では、水中ロボットが活躍します。自律型水中ロボット「MONACA(モナカ)」の開発秘話や棚氷の底面融解の研究について、第64次南極地域観測隊に参加した東京大学生産技術研究所 巻研究室 山縣広和特任研究員(取材当時)に話を聞きました。

- 山縣広和(やまがた・ひろかず)
- 東京大学 生産技術研究所 特任研究員。2018年、慶應義塾大学 理工学研究科 総合デザイン工学専攻修了。博士(工学)。教育用 ROV(遠隔操作型水中ロボット)の考案など水中ロボット教育を通じて水中ロボット技術の向上や STEAM 教育に貢献。現在は、東京大学生産技術研究所 海中観測実装工学研究センターの巻俊宏准教授のもと、南極の海氷や 棚氷域を探査する新しい 自律型水中ロボット(AUV)「MONACA」を開発し、 南極の海氷や棚氷域の海洋探査をおこなっている。
南極の環境に合わせたロボット開発
ー極地での研究について教えてください。
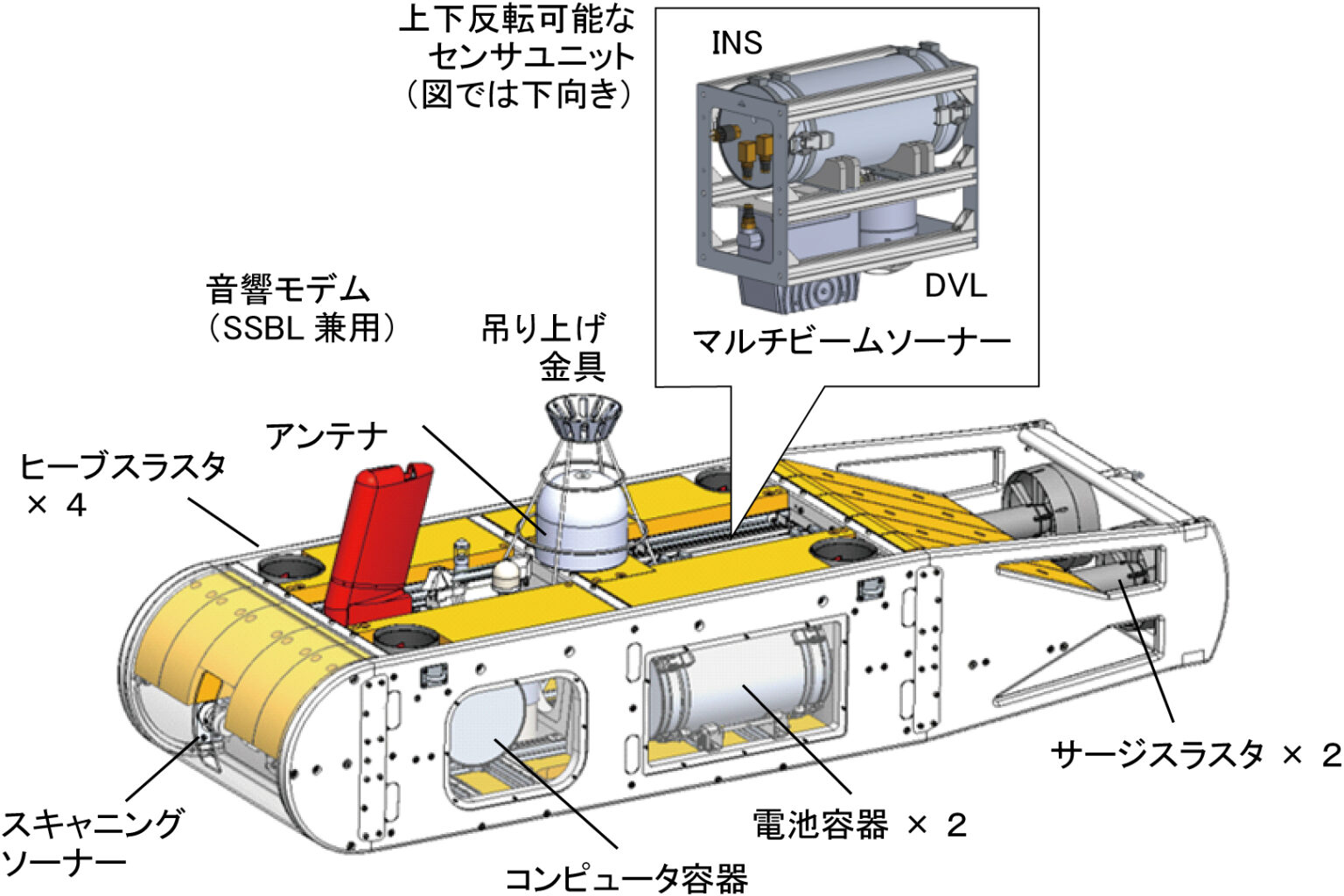
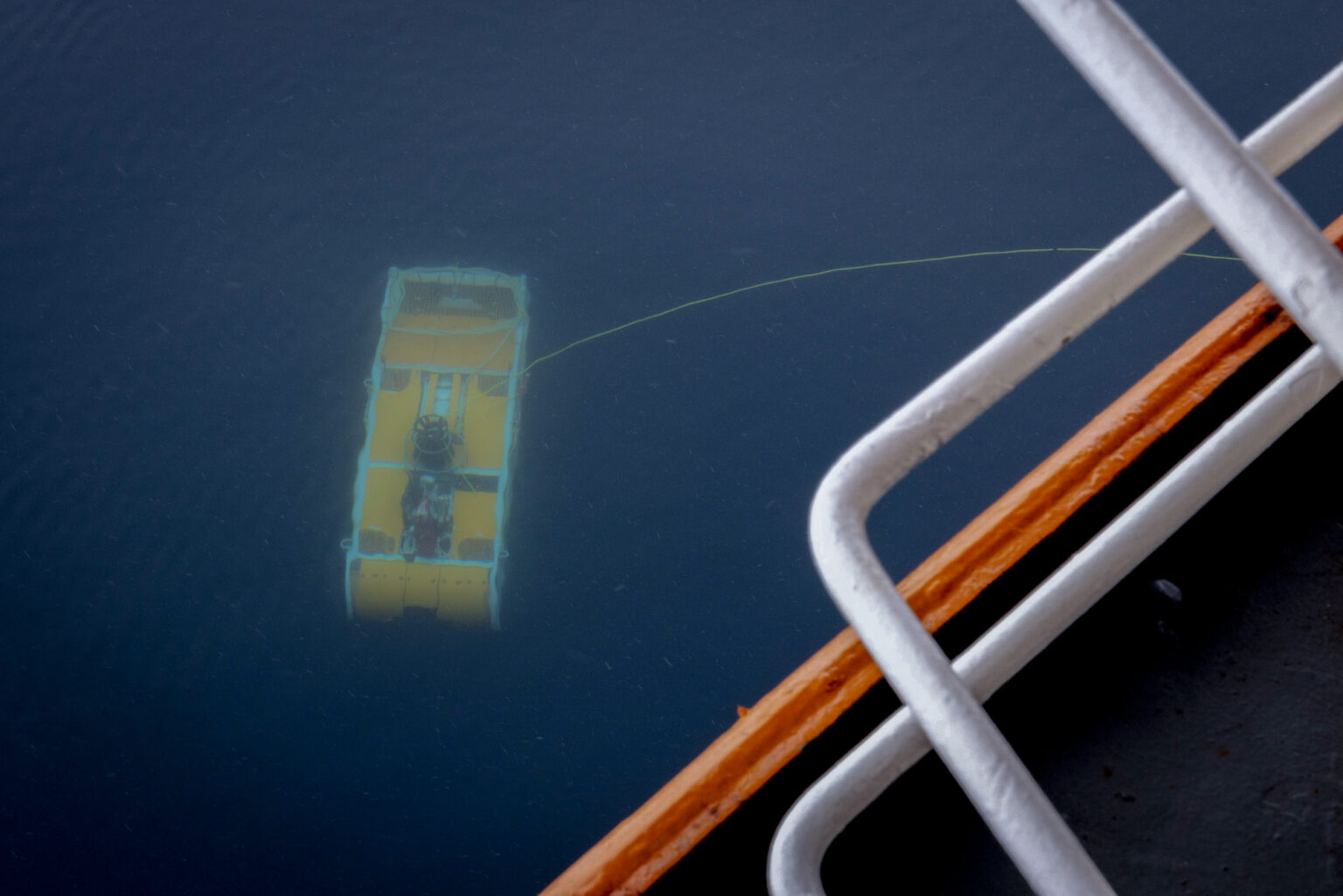
南極で研究をしていると言うと、氷についての話を期待されるのですが、私は工学の研究者です。ロボットをどのようにインテリジェントにして目的を達成するのかを考えるのが私の仕事です。64次隊では自律型水中ロボット(AUV)「MONACA(モナカ)」を持ち込んで調査をしました。このプロジェクトは新学術領域研究 『熱ー水ー物質の巨大リザーバ 全球環境変動を駆動する南大洋・南極氷床』(http://grantarctic.jp/)という国の研究プロジェクトの一環で、南極の氷の下で海流や氷の融解がどのようになっているのかを調べることが目的です。そのためにはロボットが必要だということで、工学研究者のチームがロボットを開発し、南極まで持っていきました。

ーどのような経緯で「MONACA」の開発に参加することになったのですか?
南極の氷の形は人工衛星の電波を用いたレーダーなどで上空から把握することができます。しかし、氷の裏側は穴をあけるか海に潜らなければ見ることができません。しかも、水の中は電波が届きません。防水携帯をお風呂に浸けてみるとわかりますが、2センチメートルほど沈むだけでWi-FiやGPSは途切れてしまいます。そこで、氷の下に潜ることができる自律型のロボットが必要だという話になったのです。世界では南極に投入されている自律型の水中ロボットは10例近くあるのですが、日本ではまだありませんでした。そこで国立極地研究所(以下、極地研)から私が所属する東京大学の研究室に声がかかり、開発することになりました。
ー海外で使われている水中ロボットと「MONACA」の違いは?
海外の研究者たちがよく使っているのは長く水中を走れるロボットです。氷のないところから潜らせて、長期間かつ広範囲を走らせて帰ってくる。一方、日本は南極の氷以外にも生物や海流などいろいろなことを調べられる便利なロボットが欲しいというリクエストでした。ただ、日本は全くノウハウを持っていないため、小回りが利くロボットを作りながら実際のデータも取り、開発を進めていきました。
ーそもそも水中ロボットとは?
水中ロボットには大きくわけて3種類あります。人間が乗り込んで直接操縦する有人潜水艇(HOV)、人間が乗らずに操縦をする遠隔操作型水中ロボット(ROV)、そして私たちが開発している自律型水中ロボット(AUV)です。ROVは海底の画像観測やサンプリングをする作業に向いています。ROVは極地研の他のチームでもよく使われていますが、遠隔操作をするために通信用の紐がついているので、紐の長さに限界があります。そこで紐が必要ないAUVの開発をすることになったのです。AUVでは海底ケーブルや資源を調査することに使われています。64次隊ではAUVに紐をつけながら自律的に走らせることにチャレンジしました。
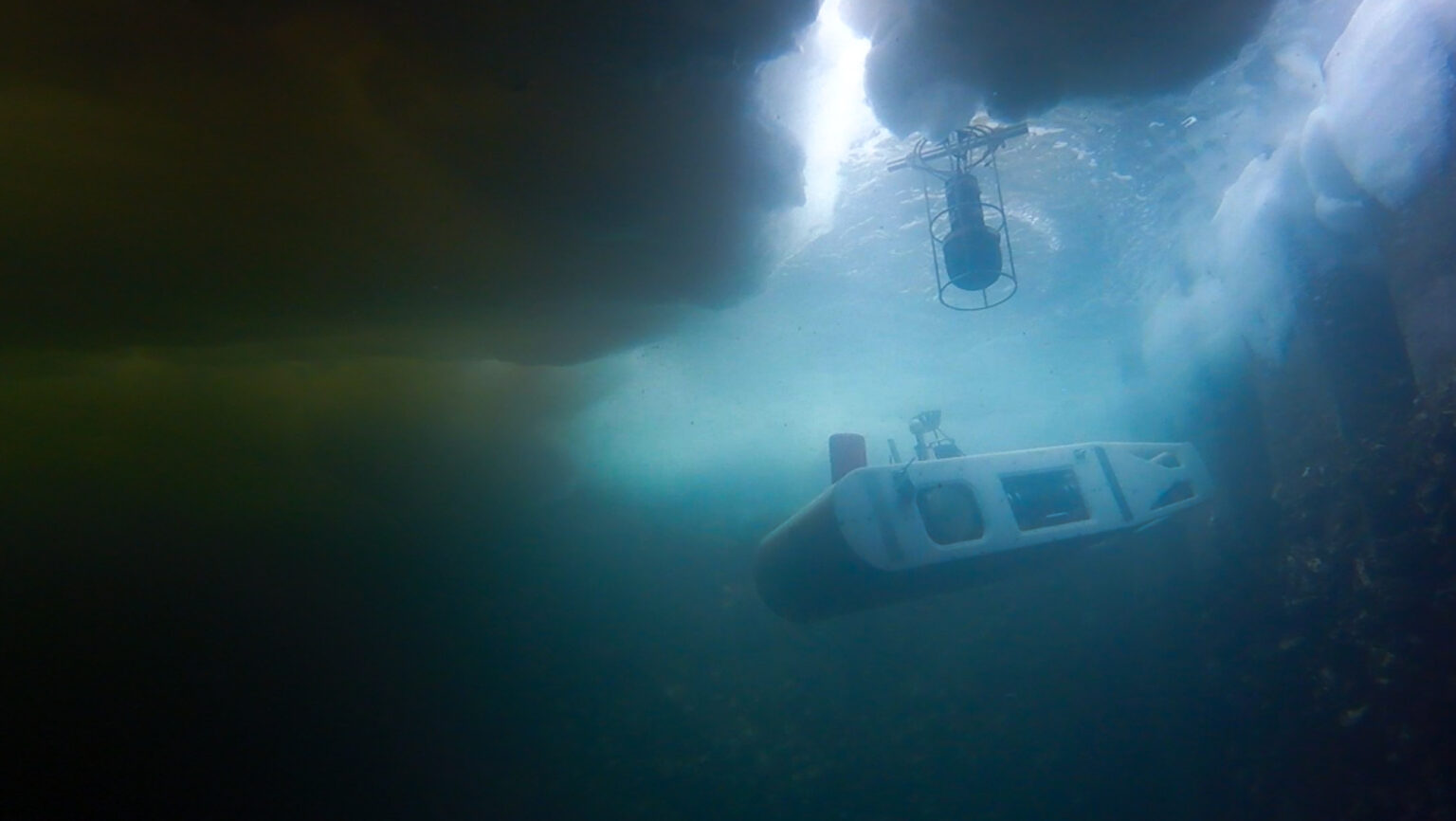
AUVは何かあれば浮かせることでGPSで場所を特定し、回収することができます。南極は普通の海と異なり氷があるために無闇に浮くことができません。しかも、南極の氷の下では見失ってしまうと回収することができません。しかし、氷の中から潜らせてまた同じ場所に戻ってくるよう自律的に行動させることはとてもハードルが高いのです。


想定外のことが起きる南極での調査
ー水中ロボットで何を調べているのですか?
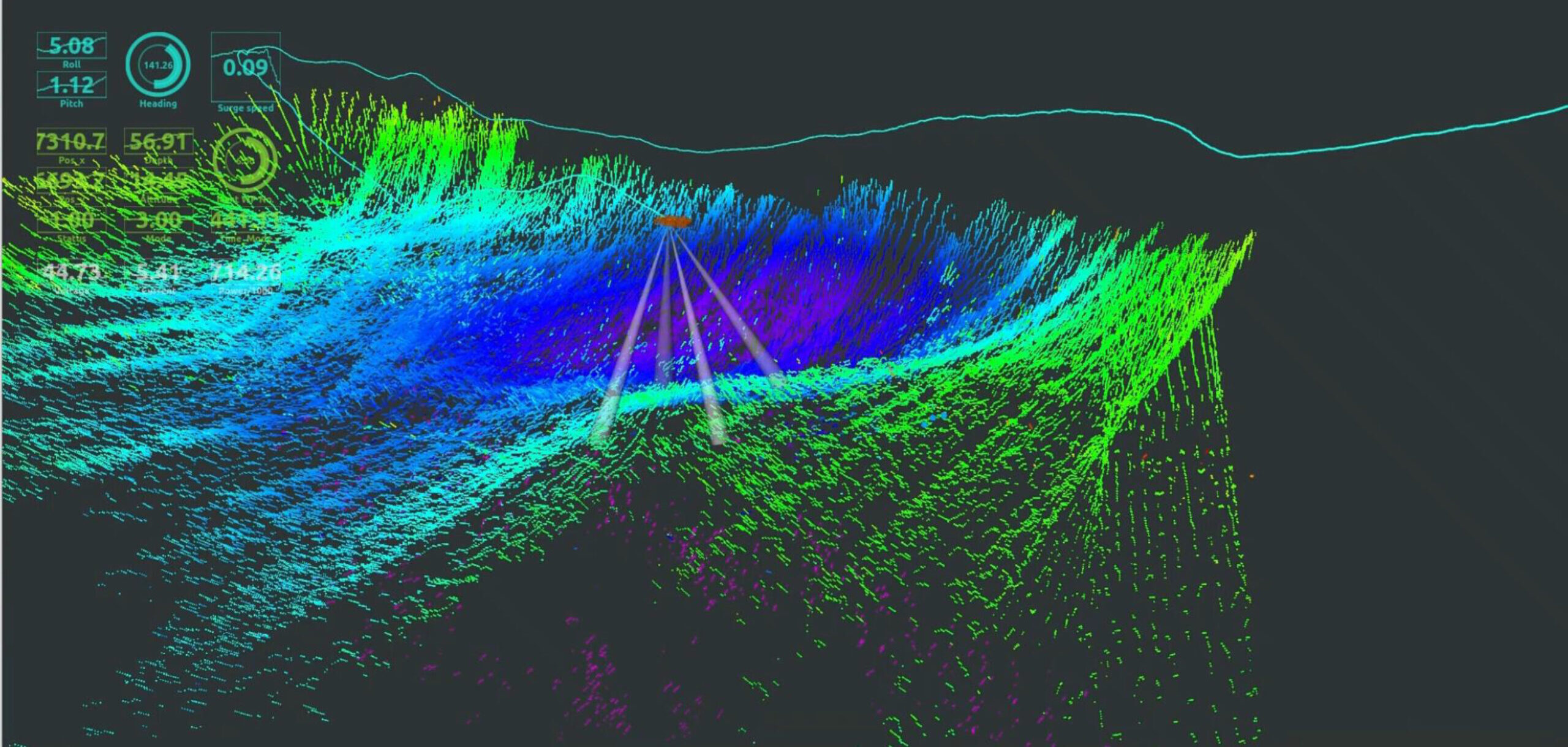
氷の裏側に潜ることで、海水に接している氷の形状がわかります。「MONACA」には舌のように海水の塩分を計測する装置(CTD)がついているので、塩分の濃さ・温度・深さを知ることができます。氷が融けていると塩分が下がる現象を利用し、氷がどこから融けているのかがわかるのです。また海流は下から上に流れているため、上層・中層・下層とそれぞれの濃度などを測定すると、氷が融けてどのような流れが起きているのかがわかります。今まではCTDでの採水やセンサを吊り下げたブイ(係留系)のようなものでピンポイントで調べていたことを「MONACA」を潜らせることで広範囲で調べることができるようになりました。ほかにも、海底の地形を調べることで過去の氷河が削った跡などもわかります。これらを総合すると、南極の氷の融解のシミュレーションができ、最終的には地球温暖化の解明につながる……らしいです。これは僕の専門ではないので断言できないのですが、そのデータをロボットを使って収集しているのです。
ー「MONACA」の開発にあたって苦労した点は?
一番苦労したのは、仕様の決定でしょうか。極地研の研究者たちとの最初の打ち合わせでは、サイズと潜りたい距離、調べたいこと、名前が決まっているだけでした。そこから仕様を決めていきました。例えば、往復20キロメートルを走るためにはどれくらいの電池容量が必要か。「しらせ」のような高さのある船から水中にロボットを降ろすためにはどれくらいの強度が必要か。凍らないようにどれくらいの寒さまで耐えられるようにするのか。いくつもの細かい条件を決めなければいけません。しかし、潜る先の海の状況はわからないことだらけです。わからないことだらけの中で、仕様を決めていくのはとても大変です。もちろん研究者たちと一緒に作っていくのですが、実際に南極に行くと想定していた状況と違っていて、現場で考え直さなければいけないことがたくさんありました。
ー南極に着いてからどのような調整をしたのですか?
その場で機体をいじることはありません。数年かけて実験して積み上げてきたことは変えられませんから。現地で調整できることは、環境にあわせた入れ方や出し方などです。私はエンジニアなのでロボットを動かすプロではありますが、船のプロとは別です。現場で研究者や乗組員たちに聞きながら「MONACA」の入れ方を調整しました。
ー想定外のことは起こりましたか?
「しらせ」の砕氷の振動で、一部の部品が割れたことですね。なんと、海に入れる前に壊れていたのです。部品を確認するために防水された耐圧殻を開けることは、それだけでリスクがあります。もちろん船に乗せるための振動対策はしていましたが、砕氷にあわせたロボットの耐震基準はありません。後から振り返るとささいな原因に感じますが、現地では不調の原因がすぐにわからず苦労しました。ロボットがしっかり動くかどうかといった信頼性以前の問題で、技術というものの本質を考えさせられました。


南極の環境にあわせたロボット開発
ー実際に南極に行ってみてどうでしたか?
技術は人間にとって矛であり盾です。毛も生えておらず生き物として弱者である人間は、他の生き物の毛皮や化学繊維などで寒さにも耐えられる仕様を手にしている。しかし、自然災害などが起きると技術という盾を失い、私たちは無防備になります。南極は船がなければ行くことすらできないし、保守している機械が止まったら死にます。人間の持つ技術が盾として機能している場所が南極なのです。その技術の力を体感できたことが、技術屋としてとても感動しました。海氷に削られて塗装の剥げた「しらせ」を港で見た時、技術って最高だなと実感できたのです。オーロラやペンギンにももちろん感動しましたが、それよりも人間の持つ技術に感動しました。

ー再び66次隊として南極に行く予定とのことですが、次回は何を調べるのですか?
64次隊では氷に穴をあけて潜り、棚氷を調べることが目的でした。66次隊では南極東部にある最大級の氷河・トッテン氷河沖で浅い表層の海水を調査する予定です。MONACAに搭載されたCTDで走りながら水質を計測することができます。今までのCTD観測では海水を採取するボトルを「しらせ」から降ろしていたのですが、どうしても船のそばでは海水が掻き混ぜられてしまいますよね。より細かい変化を調べるには「MONACA」を潜らせて「しらせ」から離れた場所で採取する必要があります。
ー前回の経験を踏まえ「MONACA」の改良した点は?
まず、ソフトウエアの信頼性を上げました。イメージとしては水中でおこなうスイカ割りです。スイカ割りは目をつぶり、なんとなく方向で目標に向かって歩きます。歩幅や方向はずれていきますが、周りからこっちだ! そっちだ! と声がかかって、その声を頼りに自分とスイカの位置(目標)がどれくらい想定とずれているか、誤差を推定するわけです。同じように船から届く音やロボット自身の音響を頼りに目標とする場所に走らせます。声のかけ方や自身の移動距離の推定方法を改善することでロボット自身が自分の位置を把握する精度を高めました。もうひとつは、とても地味な改良ですが「MONACA」を載せる台車に振動を緩和するサスペンションを入れました。また、現場で一緒に作業するメンバーは毎回替わってしまうので、現場での使いやすさを考え、カーナビのような音声ナビゲーションや誰でも操作が理解できる仕組みを作ったりもしています。
ー特殊技術ではなく、誰でも操作できるような仕組みを作るというのはとても工学的な発想ですよね。
私たちはエンジニアなので、船に乗って南極に行きたいわけではないのです(笑)。もちろん南極での研究はとても面白いし、行けてよかったと思っています。でも南極に行くためにロボット研究者になったわけではありません。できるならロボットだけ乗せて、帰ってきてくれたらいいのですが、そういうわけにもいかない。よく水中ロボットの知能は5歳児くらいといわれていますが、5歳児の世話は親だけでなく先生や親戚など他の大人も見てくれると安心じゃないですか。
ーこれから先、知能が高校生や大学生くらいになれば親がつきっきりでなくてよくなるかもしれませんよね?
もちろん可能性はあります。エネルギーの問題があるので日本ではあまり開発が進んでいませんが、アメリカなどでは核電池を用いた走りっぱなしの水中ロボットが開発されています。でも、現時点ではロボットは自分自身を修理することができないので難しいですね。

ロボット研究者としての使命
ー幼い頃からロボット研究者になりたいと思っていたのですか?
もともとロボットアニメが好きな子どもでした。ロボットの研究者を志したきっかけは、ホンダの自立歩行人間型ロボット「P3」が歩いているニュースを見た時です。こういうロボットを作ってみたい! と思ったのです。小学生の頃はミニ四駆で遊んでいて、中学生や高校生になってもずっとロボットを作っていました。ずっとブレずに博士になりたいと思っていました。でも子どもが思い描く博士ってなんでも作れてなんでもできる“ハカセ”なんですよね。それが博士(はくし)になると、要求されるものは全く違うのですが。
ーロボットを作りたいなら企業に行くという選択肢もありましたか?
なかったです。好きなように研究をしたかったからかもしれません。研究者になれば、自分で目標設定してできることと、人を育てることも好きなのでアカデミックな場での研究が向いていると思っていました。10年以上水中ロボコンの運営にも携わっています。STEAM教育向けのキットを制作したり、ライフワークとしておこなったりしています。研究者にしてはかける労力は多いほうだと思います。
僕は教育をおこなうことは義務だと思っています。先人からメディアなどでロボットに興味を持つきっかけをもらったので、それを次の世代に繋いでいきたい。興味を持った人に入り口をたくさん用意する必要があるのです。若い人たちには効率よく学んでもらって、一歩でも技術を進めることができるようにしたい。だからアウトリーチ活動にも積極的ですし、なるべくかっこよくありたい。実際は、はんだ付けひとつに振り回されるような泥臭いこともやっていますが(笑)、研究者としてかっこよく生きていることを示していきたいと考えています。

ーロボットの中でも水中ロボットを専門にした理由は?
最初はヒューマノイド(人型ロボット)の研究をしていたのですが、あまりうまくいかなかったのです。ある時、水中ロボコンの告知をみつけたのですが、その時の参加チーム数が少なくて、これなら天下を取れるのではないかなと思ったのです(笑)。そこから3年かかって優勝し、水中ロボットの研究で博士号も取得しました。ロボット界では、水中ロボットはマイナーなんです。多くのロボットは働いているところが見られますよね。ヒューマノイドやドローン、ロケットなどは、どのように動いて何をしているかがわかります。しかし、水中ロボットは切り離して潜ってしまうとその先が見られません。だからこそもっと面白さをアピールして、かっこよく見せていきたいと考えています。
ー研究に行き詰まる時はどうしますか?
大体行き詰まっていますが(笑)、泥臭く頑張る、人と話す、お酒を飲んで寝る、のどれかですね。やるしかないですね。そもそも誰もやったことがないことを研究しているので、うまくいかないことが普通なのです。それに対してできていないと批判するほうがおかしい。それなりに苦労はするし、うまくいく方法を考えるしかないのです。
ー南極に行ったことでニュースなどでも取り上げられましたが、周りの反応は?
家族以外からも反応をたくさんもらって、特に小学校時代の友人から連絡がきました。30代後半はアイデンティティクライシスの時期なんですね。初志貫徹でロボット研究を続けて、それが多少なりとも報われていることに対して、俺も頑張ろうと思ったとメッセージをくれました。好きでやっていると逃げ場がないので、やるしかないわけですが、そういうメッセージをもらうと間違ってなかったなと思います。
ー外部からみて極地研の研究者の特徴はありますか?
私たちエンジニアは手の届くものをなるべく制御したいのです。でも自然を相手にしている研究者たちはできるところまではやるが、できなかったらしょうがないという感覚が違います。あとはコミュニケーション能力が高い方が多いですよね。「しらせ」での作業では研究者だけでなく自衛隊の乗組員たちとも一緒に作業します。特にリーダーとなる研究者たちほど、チームを率いるコミュニケーション能力の高さに驚かされます。
ーロボット研究者になりたいという学生にメッセージはありますか?
研究者はその道のトップだとみられますが、探すと無限に上のレベルの人たちがいます。そういう場で自分の売り込み方を考えると、多角化することかなと。もちろんひとつの技術を極めることは必要ですが、何か一本のレースで一位になることはとても難しい。メジャーなものであればあるほど難しいのです。かといってマイナーなレースで一位をとっても生き残れない。二つ以上のもので、ひとつを世界クラスにして、もうひとつ別のスキルを持つ。そうすれば他にはいないオンリーワンになれる。この人がいいとなると仕事をもらえて、生き残っていけるのです。もちろん、好きなことを好き! と突き詰めていくことが一番大切です。
写真:国立極地研究所、取材・原稿:服部円