
先人たちが積み重ねた膨大なデータを背に、研究者は未知なる南極海を舞台に今日も装置を潜らせる。南極海における日本の海洋観測を紹介するリレー連載。
2025年、第66次南極地域観測隊において、国産AUV(自律型水中ロボット)”MONACA(モナカ)”はリュツォ・ホルム湾とトッテン氷河沖の2箇所で同海域では初めてとなる無索自律航行を達成した。ここでは64次隊での運用からの改善点を挙げ、実際に行われた運用を語りたい。
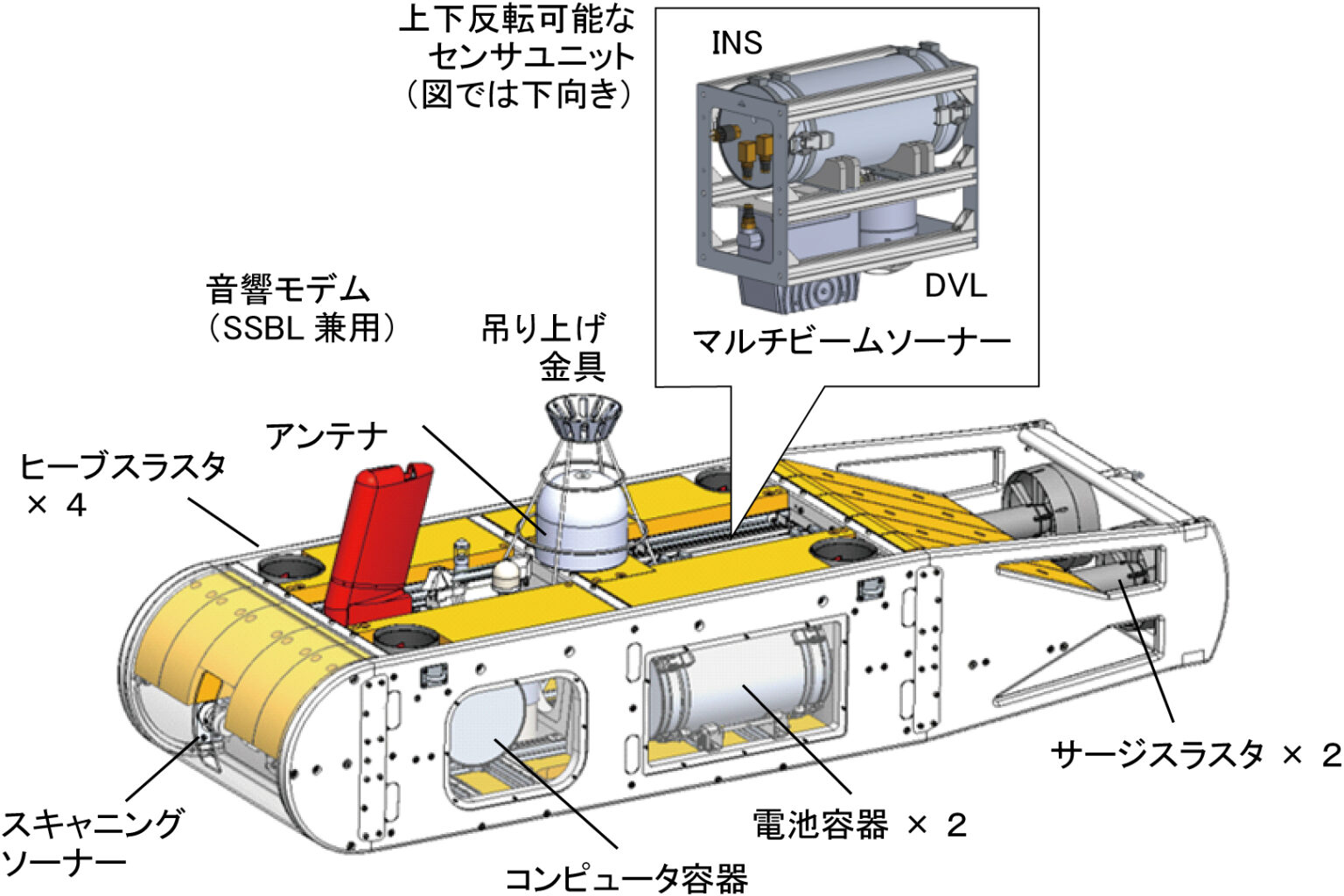
極域でのAUV運用はカナダISE社の開発したTheseus AUVを初めとして複数の国で10例以上の実績がある。多くの機体は大型で海底と海氷に対応する複数のセンサを持ち、長距離航行を行うが、MONACAは中型で小回りが効く機体とし、センサも1つのユニットをミッションに応じて向きを変えて使い回す構造である。これらは南極観測船「しらせ」のデッキサイズや運用利便性を考慮しつつ小さな開放水面でも浮上できるようにすることが目的であった。これらの機能は64次隊で運用・評価され、開発当初の想定と異なる仕様や極地運用に耐えない項目が散見されたため、帰国後の1年間で改善を加えることとなった。(これらについて詳しくは前回を参照されたい)
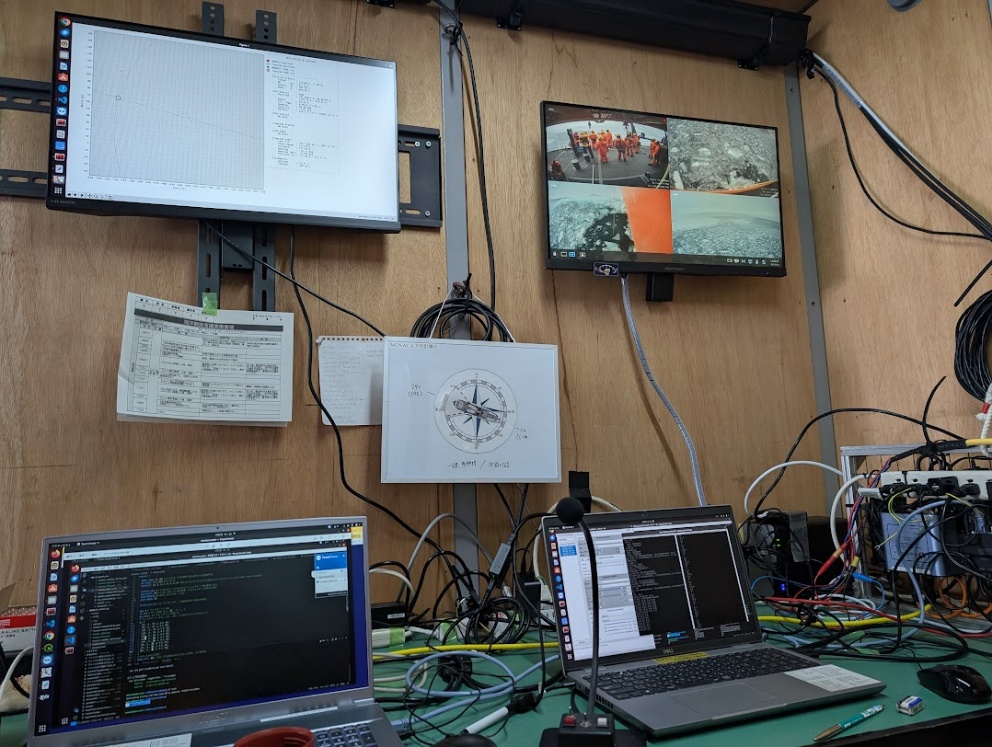
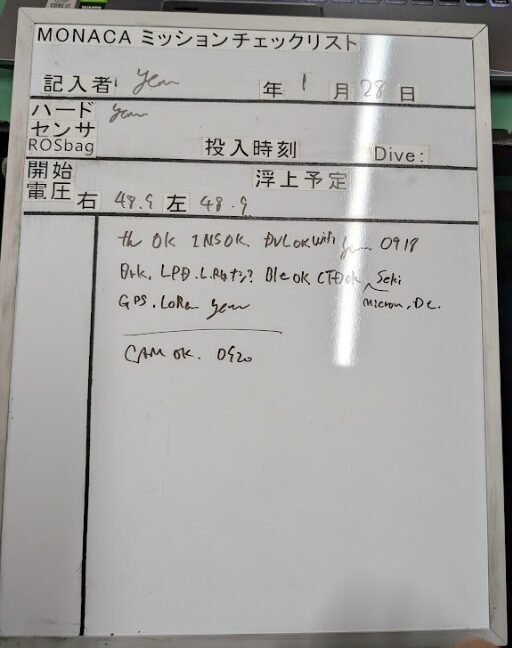
まず運用関連だ。「しらせ」以前に東京海洋大学練習船「海鷹丸」以外での大型船運用実績がなかったMONACAは運用地点から離れた艦橋や多くの運用担当者との連携実績が乏しかった。これが64次隊における現場での意思疎通を難しくした。同じ方向を向けない中での運用は双方に強いストレスを生む辛い経験となった。そこで66次隊では運用については主任運用担当者が前面に出ること、一通りの運用パターンをフローチャート化した運用マニュアルの整備や調整を主軸とした意識合わせを徹底した。また、MONACAの運用メンバーは現状で山縣以外は毎年メンバーが変わっているため、運用利便性を向上するべくホワイトボードなどでコンテナラボ内の小物も充実させている。
ソフトウェア関連については状態遷移と自己位置推定をアップデートしている。状態遷移はいわば、動きを切り替えるルールだ。時間経過や機体の状況によって行う作業を変えることができる。例えば、「2分間潜航して、10分間水平に移動して、その後直ちに浮上する」といったことを事前に指示し、状況が変わった(トラブルや船からの指示)場合はそれに合わせた動きをするといった具合だ。66次隊からはミッションファイルを改善することでプログラムへの直接編集を減らすとともに、ミッション終了後に浮上するまでの動作の設定自由度を向上した。自己位置推定は読んで字の如く、自分がどの位置にいるのかを推定する機能だ。MONACAはいわばスイカ割りの原理で自己位置を推定する。つまりは、対地速度計を歩速として投入位置からの移動量を推定する。当然これにはズレが生じるので、それを周囲の声として音響測位装置から位置情報を与えて修正していく。スイカ割り同様、周囲の声はときにウソを付くので、そこは確率的推定を用いて排除する。 64次隊までの運用では移動量の推定に対地速度計で得られた速度のみを使っていたが、66次隊では対地速度計の利用が難しい深度での運用だった。そこで、スラスタの出力からも移動量を推定するアルゴリズムが追加されている。
最後にハードウェアは信頼性の底上げと運用利便性の向上を図っている。回収を容易にするために、吊り金具ではなく回収索輪にフックをかければ回収できる仕様とした。回収難易度が下がったことにより、対応できる海況が広がった。また、「しらせ」の砕氷による振動の影響を低減するために、台車にサスペンションを入れたり、耐圧殻内部の固定を見直すなどしたりしている。回路についてもノイズ対策を施し、より機体の安定感を増した。

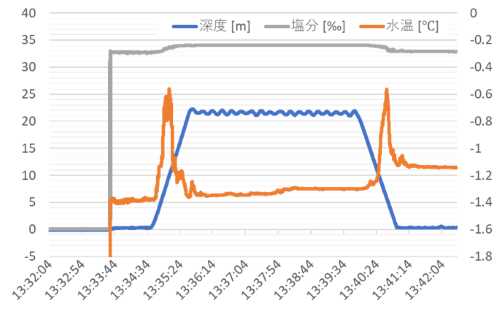
これらの改善を通してMONACAは66次隊での無索運用を達成した。今次隊の目標は「しらせ」から一定距離離れて航行することで、「しらせ」の影響を受けずに氷からの溶け水のデータを採ることが目的であった。
1レグ目の運用においては、コンテナでのオペレーションを私と関森隊員の2名で運用した。無索準備は順調に進んだものの、海況が揃わず最終日まで状況を待つこととなった。その間にも定着表内での運用を行い、以前はできなかった船尾への浮上にも成功した。運用最終日、「しらせ」を氷に横付けして展開、予定通りにオープンウォーターに浮上させることができた。「しらせ」が停止していたことから、MONACAとも距離が離れずある程度安心して運用することができた。



2レグにおいては同行者の竹本をコンテナに加えて盤石の体制となった。他方、海況には恵まれず隊全体でシップタイムが短くなった結果、当初予定の半分以下のシップタイム(合計1.5日)で無索運用をすることとなった。常に水面が開いているわけではない南極での運用は100%の安全を求めることができない。今回も30ミリメートル程度の新生氷が流れる危険な状況での展開となったが、過去の運用から十分に浮上ができると判断し投入した。この成功は64次隊、1レグでの運用実績と運用メンバーの質に依るところが多い。

さて、無索化に伴いMONACAは今後更に広い範囲での運用が可能になる見込みだ。66次隊の観測では場所を選んでの観測や長距離の観測ができていなかったが、67次隊では改善を活かして科学的に価値のあるデータ取得に貢献していきたい。成熟していくMONACAの成長を楽しみにしてほしい。

【連載】知られざる海洋観測機器たち
前の記事| 南極に挑むMONACAの歩み#01 https://kyoku.nipr.ac.jp/article/4832

- 山縣広和(やまがた・ひろかず) 日本工業大学先進工学部ロボティクス学科 准教授|博士(工学)
- 東京大学生産技術研究所特任研究員を経て現職。東京大学で自律型海中ロボット「MONACA」の設計・開発・運用に携わり、第64・66次南極地域観測隊(夏隊)に参加。日本で初めて南極海域でのAUV運用を達成する。専門は水中工学・ロボティクス・教育工学。シーランド公国伯爵。