
先人たちが積み重ねた膨大なデータを背に、研究者は未知なる南極海を舞台に今日も装置を潜らせる。南極海における日本の海洋観測を紹介するリレー連載。
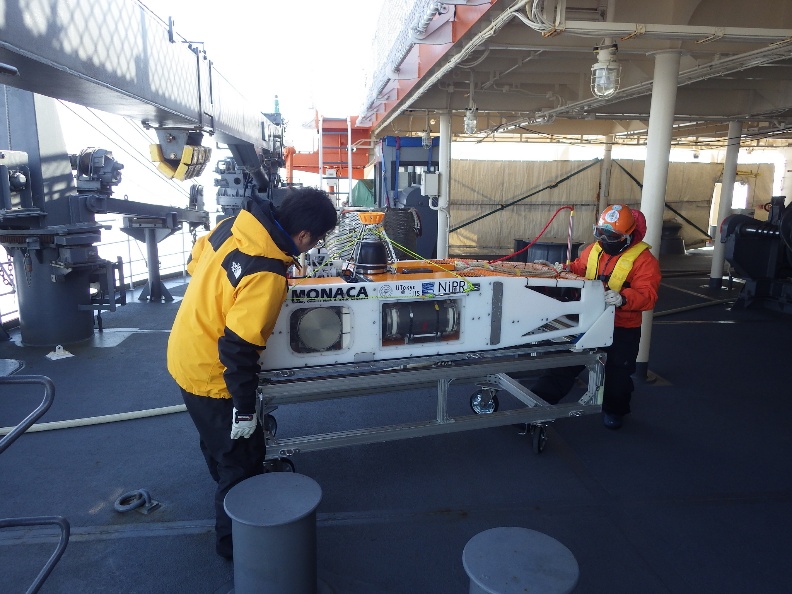
2025年、第66次南極地域観測隊がリュツォ・ホルム湾を離脱する前日、国産のAUV(自律型水中ロボット)“MONACA(モナカ)”が初めて無索自律航行を達成した。開発は2017年に始まり、2021年には北海道紋別で海氷下航行を、続いて静岡県下田での自律航行を成功させている。そして2023年、64次隊では有索ながら自律運用を実現し、昭和基地沖での20回の潜航により合計約17時間でおよそ15キロメートルの走行を記録した。この際取得されたデータの面積は重複を含めば海氷底面形状でサッカーコート70面分、海底側は64面分となった。数字だけ見れば大きな成果に見えるが、砕氷航行で機体のバイタルパート(損傷すると致命的な重要区画)へのダメージや、開発当初より前提としていた“安定した開放水面”の確保が困難であること、現場での南極観測船「しらせ」やサイエンティストとの調整方法などの準備不足が明らかとなった。そこで、66次隊に向けて大幅な戦略変更が必要となった。


これらの結果を受けて、66次隊に向けた改善は64次隊帰国後直ちに始められた。生の経験は量的なデータに落とすと消え去ってしまうものが多い一方で、データにできない感覚は時間とともに腐ってしまう。そこで当時のMONACAチームは、「しらせ」の帰路に運用トラブルを洗い出し、運用・ソフトウェア・ハードウェアの3点に整理してA4用紙2枚の改善リストを作成した。その場にいたのが機体の運用黎明期を支えたメンバー達だったことも幸いした。
詳細は次回に譲るが、運用面では“チェック項目の簡略化”、“データ確認の自動化”、“対外コミュニケーション”などを柱に据えた。ソフトウェアでは“自己位置推定の改良”、“状態遷移ルールの刷新”、“操作インターフェイスの改善”を進め、ハードウェアでは“振動”や“ノイズ”を抑える安定化対策を実施した。改善を経たMONACAは66次隊でリュツォ・ホルム湾8回、トッテン氷河沖3回の潜航を実施し、計19時間で総走行距離約11キロメートルを記録、ついに無索運用を達成した。64次隊の半分の投入回数で同等の航続距離を示せたこと自体が、改善の有効性を物語っている。
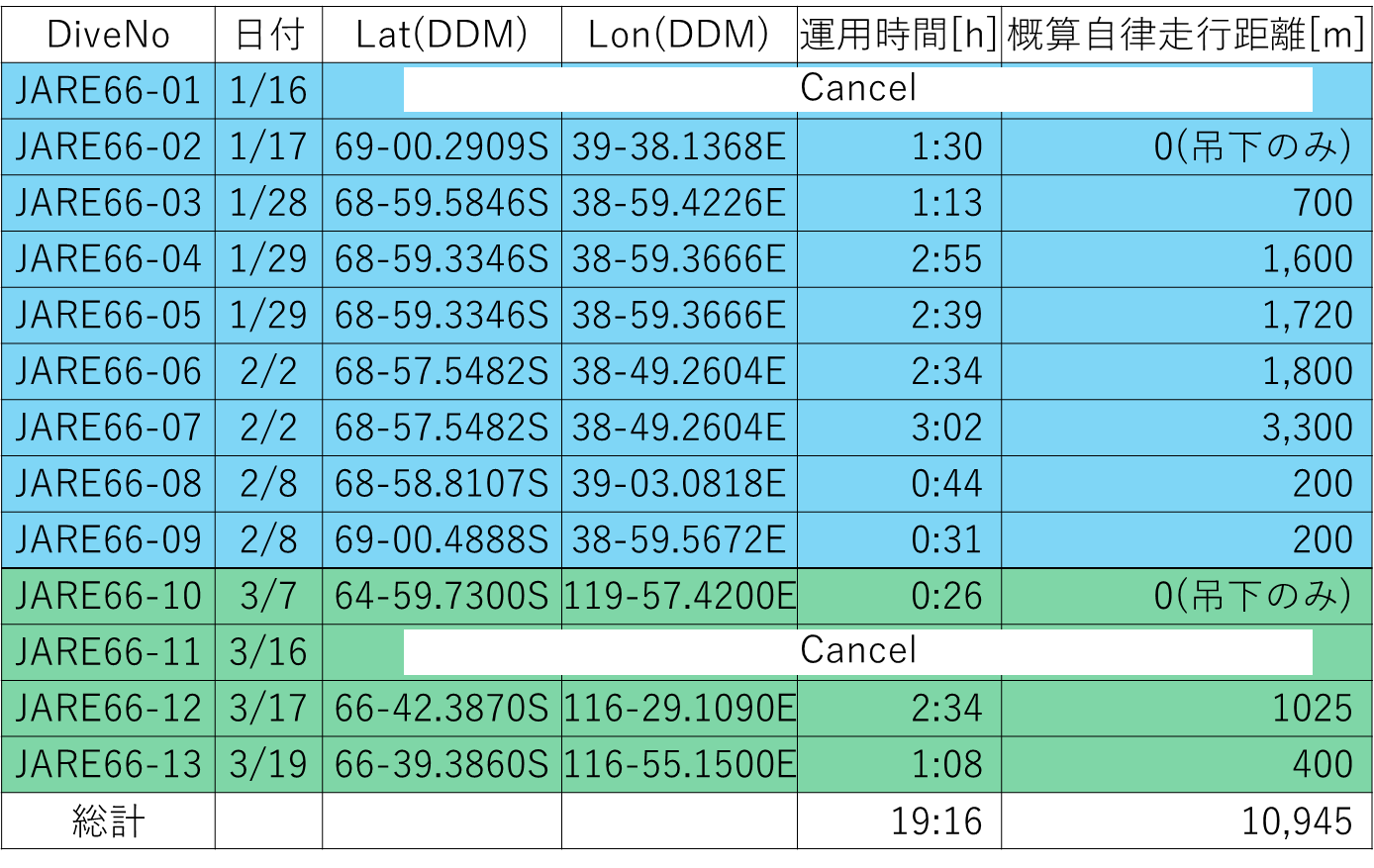
リュツォ・ホルム湾では海況に恵まれたため、無索化前に船尾でのピンポイント浮上に成功し、リュツォ・ホルム湾とトッテン氷河沖で実施した無索運用では「しらせ」から離れた場所での水質データを得ることができた。残念なことに投入場所を選ぶことができなかったことから科学的な価値にはまだ疑問が残る部分はあるが、条件が揃えばMONACAが道具として役立つときが近づいている。その手応えを確かに感じている。次回は、こうした成果を支えた改善と運用の実際を記していく予定だ。
【連載】知られざる海洋観測機器たち
前の記事| 暗い海の底で圧力の変動を測る、海底圧力計 https://kyoku.nipr.ac.jp/article/2312

- 山縣広和(やまがた・ひろかず) 日本工業大学先進工学部ロボティクス学科 准教授|博士(工学)
- 東京大学生産技術研究所特任研究員を経て現職。東京大学で自律型海中ロボット「MONACA」の設計・開発・運用に携わり、第64・66次南極地域観測隊(夏隊)に参加。日本で初めて南極海域でのAUV運用を達成する。専門は水中工学・ロボティクス・教育工学。シーランド公国伯爵。